ガントリー
みんなの夢。ガントリー。
金須(1972)の圃場作業装置 が、日本で初めての屋外無人作業機械ではないかと、行本・野口らは報告している。 (金須さんはもともと、土壌物理の人だと思う土壌物性)
農業機械化研究所は鴻巣の、農機研の前身の機関である。そこの作品。 どうして、ガントリーのモチベーションなのであるかと読んでみると、
我が国においては耕地が狭いため旋回回数が多く,とくに水田の場合は土壌が柔軟なために車輪のスリップや沈下,あるいは畦畔乗り越え時の事故の発生など が予想されるため,これらの自動操縦トラクタをそのまま導入することは困難であって,わが国には独自の自動化方式があってしかるべきものと思われる。
そこで作業機の走行を,コンクリート畦畔などの堅固な軌条により行なわせて走行性の問題を解決するとともに,自動操縦を行なわせることにより,労力節減および安全問題の解決を図ろうとするのが,いわゆる圃場作業装置である。
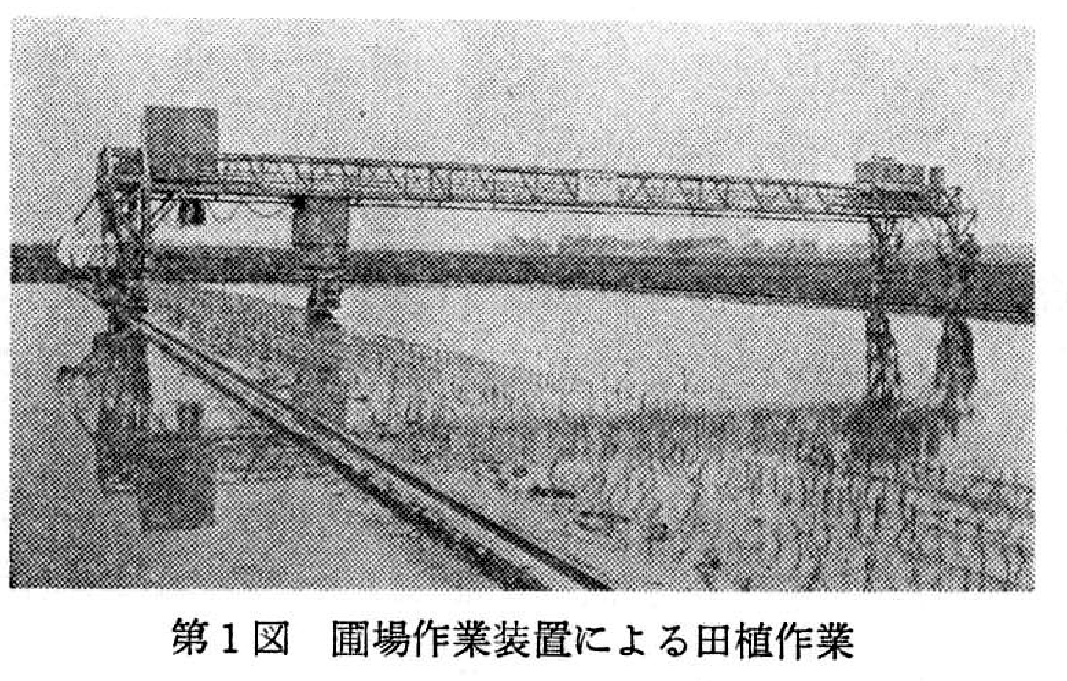
第1図は農業機械化研究所において1970年に試作した1号機を改良し,1975年3月に完成した第2号機であるが従来のトラクタとは全く異なった概念のものであって門形クレーンに似た形態を持っている。
すなわち圃場両端に設けたコンクリート製の畦畔をレールとし,この上を自動走行するガーダの下側に作業台車を懸架し,この作業台車に各種の作業機を装着して耕転・代掻き・田植・防除および収穫の各作業を自動的に行なわせるものである。
ガーダが前進して圃場の末端に達すると,スイッチが作動してガーダは自動的に停止し,作業機は上昇して向きを変え,作業幅だけ横に移動したのち下降して再び作業を開始する。同様のサイクルを繰返して第1圃場全面の作業を終えると,ガーダは圃場末端に設けられた移動用コンクリ―トレール上を横に移動して第2圃場に入り,以下前述の作業を繰返す。
このようにして全部の圃場の作業を終えると,作業装置は再び移動用レールに沿って格納庫に自動的に帰還する。
したがって最初に作業機をセットし,始動のスイッチを入れさえすれば,あとはまったく監視する必要はなく,人は他の仕事に従事するなり,夜間ならば就寝してもいっこうに差支えないのである。
この装置で行なえる作業としては,耕耘・代掻き・施肥・播種・田植え・除草・薬剤散布・収穫など,ほとんどすべての圃場作業が含まれる。
金須らの作業装置の利用して、あれこれしていた報告が残っている。
色々な、農機研絡みの研究報告で、引用されている
-
岡本嗣男先生のレビュー ここでは大域的にガントリーシステム、という言葉が登場している。
この条件にかなう圃場作業の装置化として,門型クレーンに似た圃場作業装置が考えられた. 1970年農業機械化研究所で水田作業を対象とした圃場作業装置が作られ3),1972年イギリスのNIAEでは連棟ハウス内の各種作業用装置4),1974年島根大学農学部農場には温室内汎用作業装置が設置された. 当農業研究センターには1981年筑波移転時に,農業機械の実験装置,そして自動化無人作業技術研究用装置として圃場作業装置"ガントリー"が設置された
ガントリーは,門型クレーンや天井クレーンのように圃場の外側に敷設された2本のレール上を移動するガータに作業機を取り付け,作業機を前後・左右そして上下方向へ任意に移動させて作業する方式で,従来のトラクタなどのような走行車輪やクローラによる圃場内走行を行わずに作業機を移動させる全く異なった概念の作業装置である.
圃場内を踏まずに作業をする方式は1800年代欧米における巨大な蒸気トラクタ時代にすでに考えられていた. その当時は蒸気トラクタがあまりにも重量が重く,作物を栽培する軟らかい土の上を鉄車輪で走行できないことから考案された装置であったため,小型の内燃機関の登場で姿を消している.
今日再び作業の自動化無人化の手段として登場した.
ガントリーの主要な構造は,圃場両側の通路(畦畔)に敷設したレール上を鉄車輪で移動する門型をした長いスパンのガータ部,このガータに懸垂状態で左右に移動できる作業機取付部,そして制御部から成っている.
操作方法は試験装置でもあることから,手動スイッチで行うマニュアル操作,定められた順序に動かすシーケンス制御,任意に作成したプログラムによって動かすコンピュータ制御の3方式を備えている(図5).
ガントリーに取り付けられる作業機類は,稲作ではロータリ,施肥機,田植機,噴霧機,コンバイン,その他麦作や大豆作用の作業機などであり,すべて市販機め走行部を取りはずし,モータ駆動に改造したものである.
動きの精度は,ガータ全体の前後移動が10cm単位,作業機取付部の左右移動がcm単位,作業機の上下移勤がmm単位で制御でき,各種作業機に適した速 度や姿勢で任意の範囲を自動運転できる(図6,7).
別の圃場へは圃場外の横移動用レール上で,作業用車輪と直角方向の移動用車輪に切り換えて移動する方式である.したがってシーケンス制御およびコンピュータ制御によれば,格納庫から目的の圃場に出て作業機を動かし,直線作業,圃場端での方向転換,条間の横移動,そして再び直線作業という行程を繰り返 して作業を終え,次の圃場または再び格納庫へ帰る一連の作業を全自動で行え,オペレータは作業前にプログラムの作成と作業機をセットする作業,または収穫物を運搬車へ移す場合などの一部マニュアル操作を行うだけで通常の作業は無人で行うようになっている.
なお,ガントリー本体と制御装置との通信は,センサからの信号とコンピュータからの指令,および試験用のため作業機各部の回転やトルクなどの測定信号およびTV画像信号など膨大な通信量になるので,光通信方式を取り入れ,電源と一体のケーブルでドラム巻取方式となっている.
ガントリーは無人作業が可能であることから従来の作業機とは異なった作業方法が考えられる.まず,耕うん,整地作業などは夜間運転も可能なため,1台の作業機による作業可能面積が従来機の倍以上になること,防除や収穫作業などではオペレータが補助作業を間欠的に行うだけのため,1人のオペレータが複数のガントリーを同時に動かすことが可能であり,また農薬散布の現場から離れられることから,大幅な省力化と共に作業安全の確保ができることになる.
次に,タイヤなどによる走行がないので,条間を狭くしたり,千鳥格子状に作物を栽培することも考えられる. 従来の作業では前作物を収穫した後に次の作物を播種又は移植するが,ガントリーでは収穫前に条間に次の作物を播種又は移植してその若いころは,今ある作物の茎葉で強風や豪雨から保護され,十分根付いてから前の作物を収穫する作業方法も走行部が無いことからでき,作物栽培回数を増して土地生産性を増加 する可能性も含んでいる.
また,高度な自動制御が可能なことから新しい作業機として,雑草防除では雑草だけを取り除いたり,野菜の収穫では熟度や大きさによって選択的に収穫する 方式が考えられる.はじめに紹介した農業機械の自動化における作業対象物のセンシングはほとんどが接触型センサで行い,案内車輪の上下動や分草板の左右への振れによるON・OFF制御方式が多いが,ガントリーによる間欠的,選択的な作業をする自動化には接触型センサだけでは難しい場面が多く,非接触で対象 物を感知する技術が必要となってくる
ガントリーに作業機を取り付けた場合,圃場を走るトラクタに作業機を取り付けた場合と最も異なる点は,圃場内での作業機の三次元位置がはっきりしており,かつ不安定に変動しないことが特長である.したがって非接触で対象物を認識した場合でも,作業機と対象物の位置関係を安定してとらえられることになる. このことから,すでに産業用として広く利用されているいわゆる工業用ロボットを農業用作業機として利用することも可能な条件をこのガントリーは備えて おり,工業用ロボットの応用が可能となれば,前述した非接触センシングと選択的作業を組み合わせた知能作業機も夢でなくなると思われる.
筑波に持ってきた後のガントリーの写真がきれいである。
木谷ら、は東大で農研機構とは異なるシステムのガントリーを運用していたようだ。
不明な機械
他にも、小松製作所製らしいガントリータイプの作業台車が鴻巣にあるようだが、これはどこのものなのか、不明である。 いくらほ場作業台車とか検索してもまったく見つからないことから、これはおそらくガントリーだけど、何らかの試験機であり、北大にもあった、電気式の牽引抵抗測定装置かなにかであろうと考えた。
土槽試験のなにかだと考え、土壌肥料か作物のほうか、どっちかで絞ってみようと方向転換した。
見つけた!!
なんだこの人、私と同じじゃないか。
金須さんの関連論文が鍵だった。
これとか、
とか、
-
鏑木1963: トラクタの牽引性能および作業負荷特性に関する研究 で登場する、「測定用台車」「人工圃場台車」「人工圃場測定車」 がこれである。
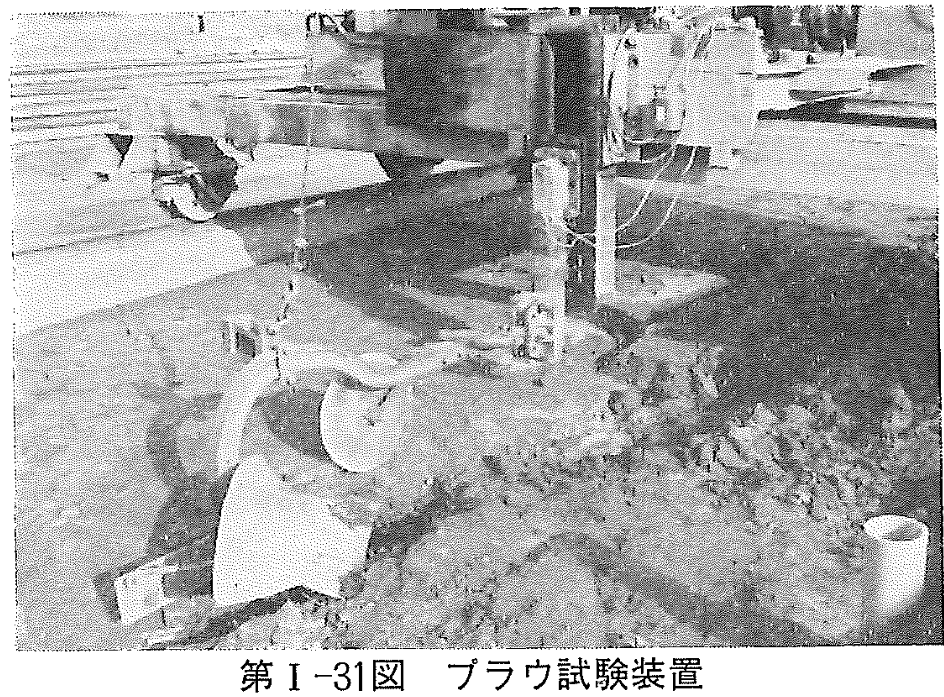
には詳しく書かれていて、プラウも使ってたらしい。
鏑木1963: トラクタの牽引性能および作業負荷特性に関する研究
ここに、人工圃場に関する内容がよく書かれている。
人工圃場の必要性
農業機械化研究促進上の大きな障害となる問題点として、度所8うが各地域ごとに相違し、ある地域の試験結果が他の地域に適用できない難点がある。
また土性の異なる地域は散財しており、試験を実施するには、供し農業機械・測定器・人員の移動・電源などに多くの困難があり、現状ではほとんど実施困難である。
このため、各種土性の土壌を集め、おのおのコンクリート枠に入れ、その上に測定台車を走行させて、試験を行うことにより上記条件を満たすばかりではなく、土壌処理が均一にでき、正確な測定装置を使用できるなどの利点を持った人工圃場を1958念に設置した。
設計にあたっては、手塚右門、上田登漁師の協力を得た。また測定者及び移動用台車の制作は小松製作所に依頼した。
この種の人工圃場はすでに1953念にアメリカ農務省耕運機械研究所に設置されているが、細部の点において国情に適するような構造とした。
人工圃場を必要とする理由を列記すれば次の通りである。
- 各種の土壌が1箇所で得られる
- 比較的均一な土壌状態が得られる
- 任意の土壌水分および硬度が得られる
- 土壌表面がほぼ水平となる
- 測定機械などにより圃場を荒らさない
- 定置型測定器により、精密な測定を行いうる
人工圃場により施行しうる試験としては次のようなものがある。
a. トラクタの牽引性能試験 b. 被けん引車の走行性能試験 c. 牽引式さ魚雪の牽引抵抗(6成分)および作業性能試験 d. 駆動式作業機の負荷特性および作業性能試験 e. 機械の強度試験 f. 土壌および作業におよぼす影響に関する試験 g. 土壌状態が機械におよぼす影響に関する試験
測定車および移動用台車の構造概要
測定車
測定車は人工圃場の軌条上を倉庫うして前記の作業を行うものであって、動力源としてガソリン機関を搭載している。 なお、これにより3相交流200-220V 5kW の発電機を駆動し、搭載電動機を駆動する。
この測定車には供試機を移動させるため、左右・上下に移動するクレーン(容量500 kg)を据え付けてあり、電動機により操作することができる。 また、測定器の電源として、発動機付単相交流100V1kW用発電機を有している。
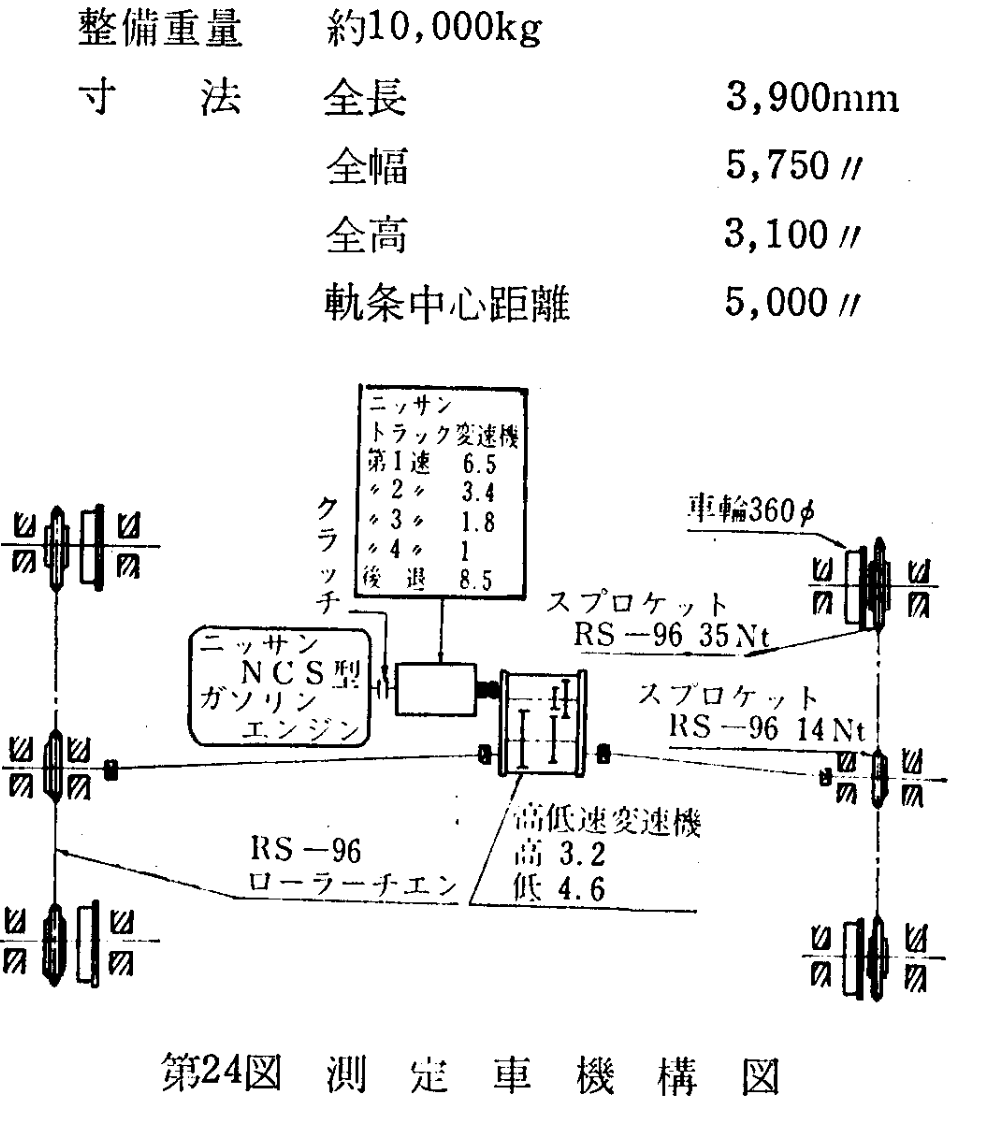
測定車の伝導機構図は24図の通りであり、使用は下記の通り.
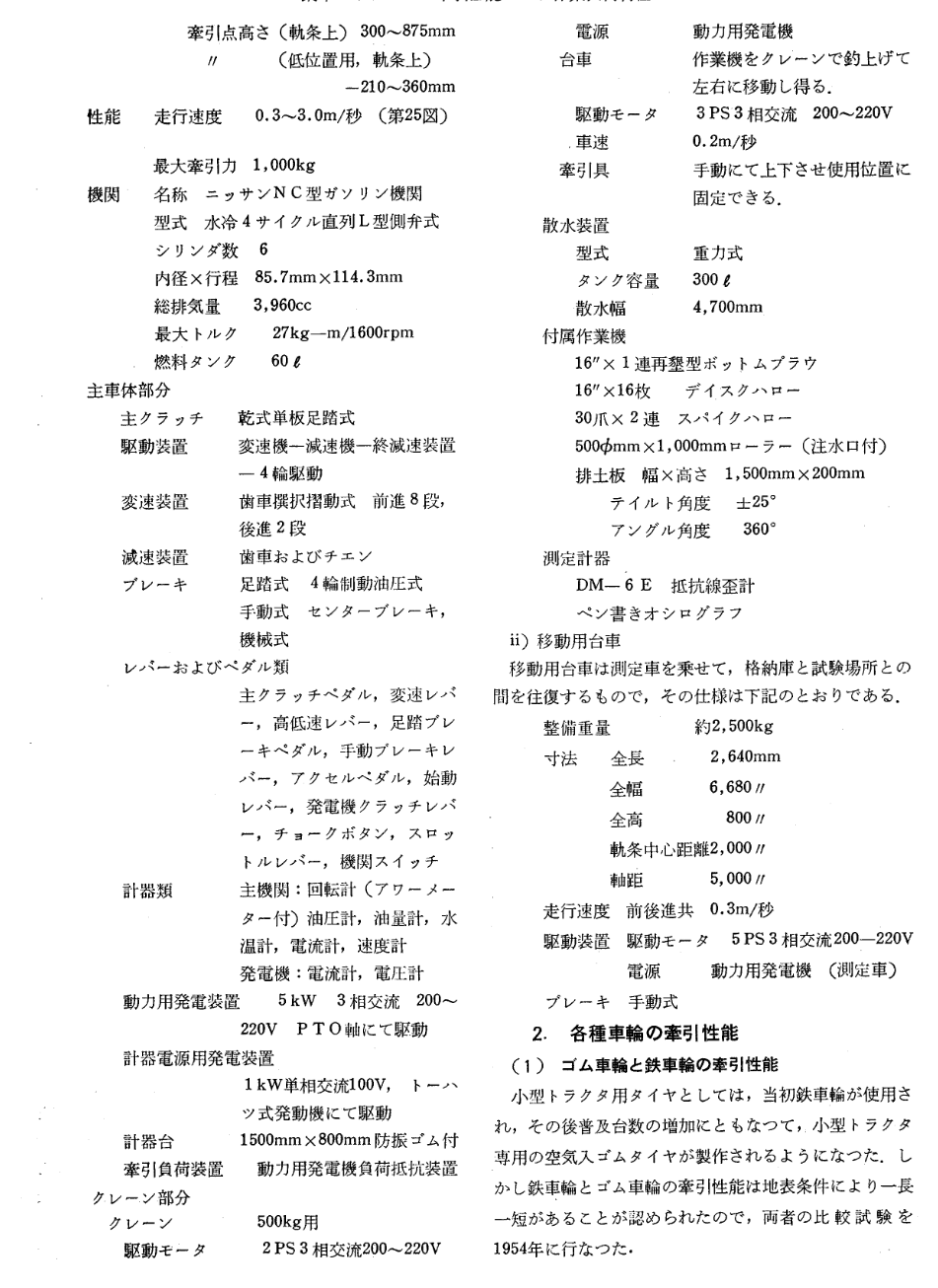
移動用台車
移動用台車は測定者を載せて、格納庫と試験場所との間を往復するもの.