農業ロボット作るならこれを読むべき。
屋外で、無人で機械を動かしてみたいと思う気持ちは、みんな昔から持っていた。
行本(1996) によると、
農用車両のロボット化は,
- 完全無人化による超省力化
- 有人作業を超える超高精度化
- 作業者が介在しないことによる安全性,快適性の飛躍的向上,
などを目標に,近年,活発に研究が行われている。 また、将来的にはロボット化農用車両ならではの新たな作業方法が続々と考案されると同時に,
- 一人で同時に多数の車両を管理,運用可能,
- 昼夜連続作業により,より小型の機械で大面積を負担し,土壌踏圧等の問題を改善,
- 圃場内における車両位置の認識機能を持つことは,派生的に圃場内の部分部分における収量や土壌状態などの把握が容易になり,無駄のない精密な管理が可能,
などの波及効果も期待されると述べられている。
また、既往研究の状況にも触れ、あまり普及が進んでこなかった結果に対して、 ほ場条件の変化に柔軟に対応することが困難であったり,経路設備が比較的大がかりであったりすることなどを実用かに至らなかった理由として挙げている。 また、屋外で使用される農用車両に限ったことではないが,ロボット化,あるいは無人化は優れた周辺技術の隔合と集積によってはじめて可能である。 このことはコンセプトそのものが優れていても,周辺技術が整わない限り実験室レベルを超えることの難しさを物語っている。
としている。
この論文は非常によくまとめられていて、何度も見直すべきだと思う。
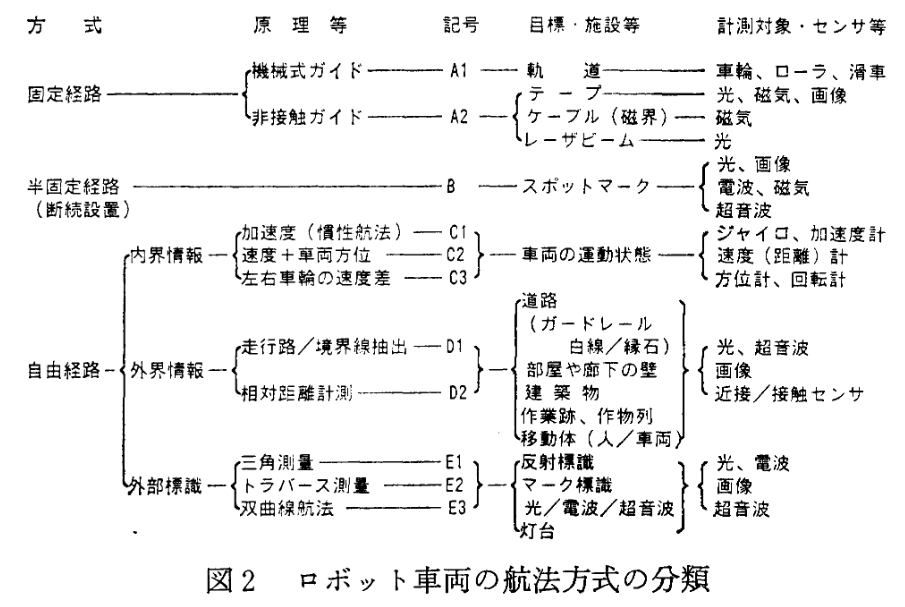
農業ロボットの構成要素として必須の5つの要素を図1に非常にうまくまとめている。
 しっかり練らないと。
しっかり練らないと。
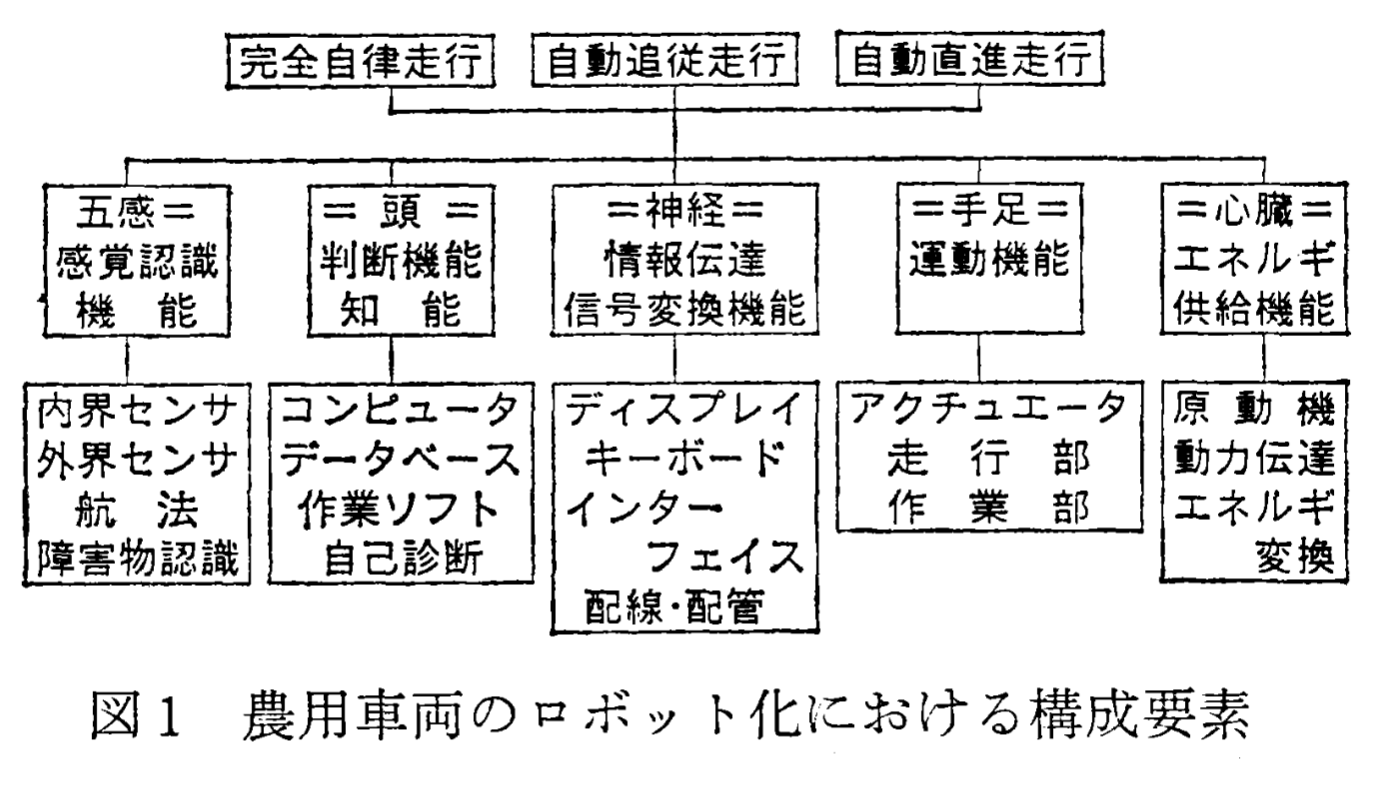
また、動くための方法として、図2には、方式, 原理が整理されており、現時点でのロボットとしても、まあおおよそ外れてはいない。